Gregory Nemec
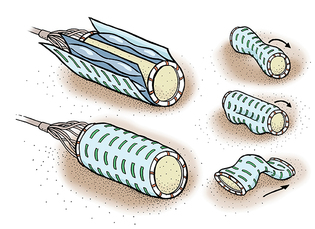
It is not the glistening metal humanoid typically evoked by the word robot. Instead, “PancakeBot,” as it’s endearingly known, is a small cylindrical thing, 15 centimeters long, reminiscent of a blood-pressure cuff. It’s lying on a flat wooden plank. You can tell it’s switched on when a silicone bladder where the cylinder meets the wood fills with air, like the inflation of a toad’s throat. The cylinder rocks unevenly a few times until it rolls forward a smidgen. Another bladder inflates. The cylinder rocks again, rolls, gets a little farther.
The process continues until the robot reaches a 14-degree slope. Here, the cylinder deflates into a flat rectangle. Then it begins its ascent inchworm-style, arching up, then flattening out, arching then flattening.
According to Dylan Shah, the doctoral candidate in mechanical engineering and materials science whose group designed it, the long-term goal is a robot that can sense its environment and morph accordingly: “something that can grow limbs and switch between, say, being a fish and a dog.” Fully realizing this aspiration is years off. For now, we must accept simpler demands: blood-pressure cuff to inchworm.
It’s the origin story of this robot that has the most meaningful implications.
Working with colleagues from Yale’s “Faboratory” research lab and the University of Vermont, Shah began the design process with a virtual simulation. He defined the environments in which the robot would need to operate—flat, hill—offered a few structural parameters, and then let a computer search for the myriad ways a robot might traverse the given surfaces and transform between shapes. The most efficient results—those that moved fastest—were then “crossbred” to simulate evolutionary selection. Finally, the best virtual offspring was brought to life.
“The main thing to distill is that we used some of the successful ‘parents’ to help create new ‘children’ within the big space of all possible robots,” Shah says.
“Similar to a population of wolves in the woods, we selected the robots that best matched our fitness function.” Such evolutionary framing fits closely with one broader motivation behind the field of soft robots (as distinct from “hard” robots, which are made of metal, plastic, and rigid circuit boards). Shah points out that soft robots generally take cues from the natural world’s diversity. “The whole field takes a lot of conceptual inspiration from the things we see in nature, because there’s just so much there,” he says. “If we can learn how to build machines that exhibit even a small portion of the behaviors and anatomies of Earth’s life forms, then we’ll have thousands of novel robot designs that will find a place in different applications.”
 loading
loading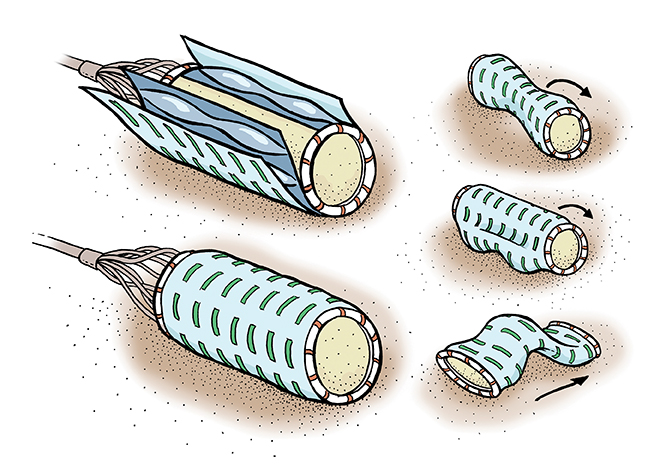

 Print
Print Email
Email